하이브리드 자동차 - 제어 기능
Mild Hybrid Electric Vehicle (MHEV) – control functions
이 기사에서는 기존의 비 하이브리드 차량과 비교했을 때 차이점과 일부 유사성에 초점을 맞춰 마일드 하이브리드 전기 자동차(MHEV)의 가장 일반적인 파워트레인 제어 기능에 대해 살펴보기로 한다.
거의 예외 없이(예: 전기 구동/크리프) 다음의 파워트레인 제어 기능은 특정 하이브리드 아키텍처에만 국한되지 않고 대부분의 아키텍처에 공통적이다.
이 기사를 살펴보기 전에 하이브리드 전기 자동차(HEV)와 특히 MHEV에 대한 이해를 높이기 위해 다음 기사를 읽어보십시오.
Cold engine cranking
내연기관(ICE)은 서로 상대적으로 움직이는 기계적 구성부품을 가지고 있다(예: 크랭크 메커니즘, 밸브트레인 등). 이 부품들 사이의 마찰은 윤활 시스템 덕분에 감소한다. 엔진이 작동 중일 때 유체 역학적 마찰을 일으키기 위해 구성 요소 사이에 오일 필름이 유지된다. 온도가 낮을수록 오일 점도가 높을수록 마찰계수가 높을수록 출발에 필요한 토크가 높아진다.

Image: Dynamic viscosity and density of the SAE30 lubricant
마찰에 영향을 미치는 또 다른 요인은 유막 두께다. 엔진이 작동하지 않으면 오일 팬에서 오일이 배출되고 오일 막 두께가 최소로 된다. 따라서 첫 번째 엔진 시동 시 오랜 정지 시간이 지난 후 기계적 구성 요소 간의 마찰이 상당히 높다.
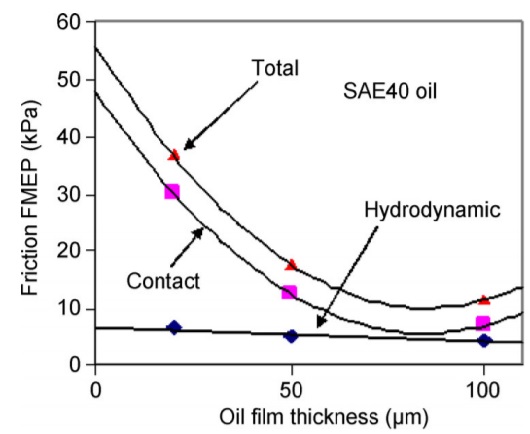
Image: FMEP function of oil film thickness
출처: Overview of automotive engine friction and reduction trends, Victor W. WONG 1, Simon C. TUNG
저온과 오일필름 두께의 결합 효과는 높은 시동 토크가 필요하므로 고마찰을 보상해야 한다. 따라서 P0 MHEV 아키텍처에 사용되는 벨트 통합 스타터 제너레이터(BiSG)는 첫 번째 엔진 시동에 적합하지 않다. 차량에 반드시 첫 번째 또는 콜드 엔진 시동에 사용되는 재래식(피논 시프트형) 스타터를 장착해야 한다.
BiSG에 고장이 발생할 경우 기존 스타터를 백업 구성 요소로 사용하여 엔진 시동이 허용된다.
Conventional Stop & Start (Idle Stop & Start)
차량이 정지해 있고 엔진이 공회전 속도로 작동하면 불필요한 연료가 연소되어 연료 소비량과 배기 가스 배출량이 증가한다. 예를 들어, NEDC 사이클에서 차량은 시간의 25% 동안 정지(0kph) 상태에 있다. WLTP 사이클에서 정지 시간은 13%, FTP75에서는 9%이다.
오늘날 대부분의 현대 자동차는 차량이 정지해 있을 때 엔진을 정지시키는 엔진 Stop & Start 기능을 가지고 있다. 이 기능은 일반적인 스타터(기어 메시를 통해 엔진에 연결) 또는 BiSG로 충족될 수 있다.
|
 Image: Conventional engine starter |
 Image: 48V Belt integrated Starter Generator (BiSG) |
기존 스타터에 비해 엔진 Stop & Start에 BiSG를 사용할 경우 다음과 같은 몇 가지 장점이 있다.
- 전기기기의 출력전력이 높아져 시작시간 단축
- 벨트 구동으로 인한 소음 및 진동 감소(기어메쉬의 변형)
기존의 Stop & Start 시스템에서는 엔진이 공회전 속도로 작동하고 차량이 정지해 있을 때 엔진이 정지한다. 이 시스템의 연료 절약량은 실제 주행 사이클에서 0% ~ 5% 사이로, 도시 교통 혼잡 조건에서 최대 10%까지 증가한다.
Advanced Stop & Start
기존의 Stop & Start와 비교했을 때, 어드밴스드 Stop & Start는 운전자가 브레이크를 밟거나 차량 속도가 임계값(예: 8kph) 미만일 때 엔진을 정지시키는 것을 의미한다. 차량이 여전히 느리게 움직이는 경우에도 엔진이 공회전하고 변속기가 분리된 상태에서 엔진을 셧다운해야 한다.
엔진 분리는 수동 변속기(MT)에서는 클러치 페달을 통과하고 자동 변속기(AT)에서는 토크 컨버터를 통해 이루어진다. 운전자가 클러치 페달(MT)을 누르거나 브레이크(AT ON)를 해제하면 엔진이 재시동된다.
이 기능은 엔진이 꺼진 기간이 연장되기 때문에 추가적인 연비 절감 효과를 가져온다.

Image: Advanced engine Stop & Start
고급 Stop & Start 기능은 Change of Mind(CoM) 상황을 처리할 수 있어야 한다. CoM 상황은 운전자가 브레이크를 밟고, 차량 속도가 임계값 아래로 떨어지고, 엔진 정지가 시작될 때 발생한다. 운전자가 브레이크 페달을 놓으면 차량이 완전히 정지하기 전에 엔진 재시동이 요청된다(운전자가 마음을 바꿨기 때문이다). 이러한 상황에서 매우 짧은 엔진 재시동 시간과 빠른 변속기 재연결은 허용 가능한 수준의 차량 주행성을 유지하기 위해 매우 중요하다.
기존의 스타터에는 전기 모터가 토크를 전달하기 전에 플라이휠의 기어와 결합하는 피니언(피니언)이 포함되어 있다. 피니언 결합과 모터 토크 사이의 타이밍은 고정되어 있으므로 독립적으로 제어할 수 없다. 이러한 설계 제약으로 인해 엔진이 완전히 정지하기 전에 피니언에 결속하려고 할 경우 스타터가 큰 소음을 내거나 손상될 위험이 있다. 이러한 불편함은 피니언과 모터가 독립적으로 제어되는 특정 피논 시프트형 스타터를 사용하거나 벨트 일체형 스타터 모터(BiSG)를 사용하여 해결할 수 있다. 차량 구동성, P0 MHEV 아키텍처에서 첨단 엔진 Stop & Start 기능은 고전압(48V) 전기 기계(BiSG)로 처리된다. 가장 큰 이유는 BiSG가 (벨트를 통해) 엔진과 영구적으로 연결돼 짧은 시간 안에 높은 양의 전력을 전달할 수 있기 때문이다.
정지-인-모션(곡선 / 타력주행)
Stop-in-Motion 기능은 차량이 상대적인 고속(예: 40kph)으로 주행하는 동안 엔진의 변속기를 분리하고 엔진을 정지(또는 공회전)하는 것을 의미한다. 타력주행 기능은 운전자가 가속 페달을 천천히 해제하고 차량이 감속할 때 활성화된다(운전자의 제동 없이).
타력주행의 근거는 차량이 일정 기간 오버런 되고 가속 및 순항하는 상황에 비해 변속기가 분리되고 엔진이 공회전(또는 꺼짐)된 상태에서 동일한 거리를 커버하는 데 필요한 연료가 적다는 것이다.
엔진 공회전 속도(Idle Coasting) 또는 엔진을 끈 상태에서(Off Coasting이라고도 함) 코팅을 수행할 수 있다. 확실한 (연료 경제) 절감을 위해 대부분의 차량 제조업체는 오프 타력주행 제어 기능이 있는 MHEV용으로 개발하고 있다.

Image: Vehicle traveled distance with and without Coasting/Sailing
두 가지 시나리오를 생각해 봅시다. 첫째, 차량은 초기 차량 속도에서 출발하며, 톱 기어(6번째)가 결속(오버런)되고 감속(연료 차단 시 연료가 연소되지 않음)한다. 엔진 손실로 인해 차량이 정지 상태에 이르게 되는 것은 상대적으로 짧은 시간과 거리다. 두 번째 시나리오에서는 차량이 감속하기 시작하면 변속기가 분리되고 엔진이 정지된다. 차량 속도를 늦출 수 있는 엔진 손실은 더 이상 없으며, 관성 때문에 차량이 더 먼 거리를 주행할 것이다.
전체적으로 타력주행 거리가 충분히 길면 오버런, 가속 및 순항 시나리오에서 엔진에 비해 연비가 개선된다. Change of Mind(예: 운전자가 브레이크 이벤트 후 차량 가속을 원하는 경우), 시스템은 빠른 엔진 재시동을 처리할 수 있어야 한다. 48V MHEV 시스템은 차량이 가속할 수 있도록 빠른 엔진 재시동 및 변속기 재연결 기능을 제공할 수 있다.
엔진이 꺼진 상태에서 P0 MHEV 아키텍처에서 타력 주행 시 차량 제조업체가 해결해야 하는 몇 가지 단점이 있다.
엔진이 정지하면 감속 단계(엔진과 직접 연결되기 때문에) 중에는 전기 기계가 전기 에너지를 생성할 수 없으므로 긴 타력주행 거리만 연료 효율 이점을 제공할 뿐 아니라, 엔진 정지 및 시동 이벤트가 자주 발생하는 경우 모든 엔진 리스타워가 감소하므로 연비가 감소할 수 있다.t 이벤트에는 비교적 많은 양의 연료가 필요하다(공회전 상태에서 엔진을 구동하는 것과 비교). 이 상황은 P2, P3 또는 P4 MHEV 아키텍처에서는 피할 수 있다. 전기 기계는 변속기 측에 있기 때문이다.
엔진 측 , 보조 장비(예: AC 컴프레서)는 더 이상 전원이 공급되지 않는다. 이 상황에서는 실내에서 필요한 온도를 보장하기 위해 온도 조절 시스템이 엔진 시동을 요청할 수 있다(또는 타력주행을 억제할 수 있다). 해결책은 AC 시스템에 48V 전기 컴프레서를 사용하는 것이다.
차량에 자동변속기가 장착된 경우 엔진정지는 변속기 오일펌프에 필요한 전원을 더 이상 공급하지 않는다. 이 경우 변속기가 적절하게 작동하기 위해 필요한 오일 압력을 공급하기 위해 AT에 오일압력 축열조 또는 전기오일펌프를 장착해야 한다.
타력주행 기능은 차량에 48V 전기 AC 컴프레서와 전기 변속기 오일 펌프가 장착된 경우 P2, P3 또는 P4 MHEV 아키텍처에 최대 연비 편익을 제공하는 것이다. 기존의 Stop & Start에 비해 Stop-in-Motion(타력주행) 기능은 WLTC에서는 약 5~7%, FTP75에서는 약 7~12%의 연비 개선을 달성할 수 있다.
Engine load shift
내연기관(ICE)의 브레이크 고유 연료 소비량(BSFC) [g/kWh]은 시간당 연료 소비량[g/h]과 엔진 출력[kW] 사이의 비율이다.
차량이 일정한 속도로 주행할 때 엔진은 최고 BSFC 값이 아닐 수 있는 특정 작동 지점(속도 및 토크)에서 작동한다. P0 MHEV 아키텍처에서는 주행성 관점에서 총 파워트레인 토크(크랭크축)가 운전자의 토크 요청을 충족해야 한다. 동일한 크랭크축 토크 레벨을 전기 기계와 내연 엔진의 다른 토크 값으로 유지할 수 있다.

Image: BSFC improvement in hybrid electric vehicles
예를 들어 운전자가 2,500rpm에서 100Nm의 토크를 요구하는 경우 일정한 차량 속도를 유지하기 위해 엔진이 저효율로 작동하며, 여기서 BFSC는 455g/kWh이다. 엔진의 효율을 높이기 위해, 전기 기계는 -150Nm의 부하 토크로 제너레이터 모드(및 배터리 충전)로 설정된다. 추가 전기 부하를 보상하기 위해 엔진 토크를 250Nm로 증가시킨다. 동일한 크랭크축 토크 레벨(250~150 = 100Nm)이 유지되며, BFSC는 320g/kWh로 엔진 효율성이 동시에 증가한다. 따라서 효율이 증가하면서 엔진 부하(토크)를 100Nm에서 250Nm로 이동시켰다.
엔진 부하 이동 전략에는 몇 가지 제약이 있는데, 그 중 하나가 배기 가스 배출이다. 높은 부하에서 내연기관 엔진은 중간 또는 낮은 부하에 비해 방출 수준(NOx, 입자)이 현저히 높다.
토크 충진
내연 엔진은 크랭크 메커니즘(피스톤, 피스톤 핀, 커넥팅 로드 및 크랭크축)을 통해 토크를 발생시킨다. 이 구성 요소들은 질량과 관성(회전 및 변환)을 가지고 있다. 또한 엔진으로 유입되는 공기는 질량이 있으므로 관성이 있다. 이러한 설계 제약 때문에 엔진은 순간적인 토크를 전달할 수 없다. 가속 페달에 구동 팁이 들어가는 경우 엔진이 필요한 작동 지점(토크 및 속도)까지 가속할 때까지 시간이 걸린다.
전기 기계는 움직이는 부품(로터)이 하나만 있고 전자석 법칙에 의해 제어되는 순간 토크를 전달할 수 있다. 하이브리드 파워트레인은 차량의 전반적인 동적 성능을 개선하기 위해 전기 기계 토크 전달의 이점을 누릴 수 있다.

Image: MHEV – engine torque fill with electric machine
토크 충전은 엔진이 전달할 수 없는 운전자의 토크 수요를 전기 기계 토크로 보상(충전)하는 것을 의미한다. 특히 저속 범위에서 내연기관 엔진은 토크 지연(지연)이 심하다. 엔진이 이 지역에서 작동하고 있고 운전자가 높은 토크를 요구하는 경우 엔진이 제공할 수 있는 것과 운전자가 요구하는 것의 차이는 전기 기계에 의해 보상된다.
예를 들어, 엔진 토크가 80Nm이고 운전자가 가속 페달(최대 부하)을 밟아 160Nm를 요구하는 경우, 엔진 토크가 상승할 때까지 추가로 80Nm를 전기 기계 토크가 혼합될 때까지 전기 기계에 공급한다.
토크 충진 기능은 과도 토크 요구 단계에서 토크 보조 기능으로 간주될 수 있다.
Torque boost
MHEV에서 총 파워트레인 토크는 엔진 토크와 전기 기계 토크 사이의 합이다. 엔진의 최대 부하 토크 특성은 전기 기계 토크로 상승(오프셋)할 수 있어 차량의 전반적인 동적 성능을 개선할 수 있다.
Image: MHEV – engine torque boost with electric machine
동일한 양의 파워트레인 토크에 대해 비 하이브리드 차량과 비교하여 MHEV 차량은 낮은 속도 범위에서 토크 특성이 개선된다는 장점이 있다. 이 기능은 전기 기계가 0 속도에서 제공하는 최대 일정 토크 때문에 가능하다.
전기기계 토크 부스트는 단기간 동안만 유지될 수 있는데, 그 주된 이유는 고전압 배터리 충전 상태(낮음)와 전력전자 및 전기기계의 온도 제한(높음)이다.
토크 부스트 기능은 정지 토크 요구 단계 중에 토크 어시스트 기능으로 간주될 수 있다.
Idle charging
MHEV에서, 전기 아키텍처 (Middle Hybrid Electric Vehicle: MHEV) 기사에서 논했듯이, MHEV에는 저전압(12V)과 고전압(48V 이상)의 두 개의 전기 네트워크가 있다. 전기 기계는 12V 네트워크에 필요한 전기 에너지를 제공하고 양쪽 배터리에서 최소 충전 수준(저전압 및 고전압)을 유지하는 역할을 담당한다. 따라서 어떤 상황에서는 차량이 정지해 있더라도 Stop & Start 기능이 억제되어 엔진이 배터리 충전 및 12V 구성 요소 에너지 수요를 위한 토크를 제공할 수 있다.
공회전 충전은 엔진이 공회전 속도로 작동하고 있고, 전기 기계는 발전기 토크로 작동하며, 엔진의 부하 역할을 한다. 엔진이 공회전 충전 상태일 때 공회전 속도는 약간 상승한다(예: 1000rpm). 엔진 토크는 공회전 토크와 전기 기계 토크 사이의 합이다.
연비 측면에서 볼 때, 유휴 충전은 손실을 포함하고 있으므로 가능한 한 피해야 한다. 전기 에너지는 차량의 감속 단계에서만 수확해야 한다. 다양한 이유로 이것이 불가능할 경우, 전기 기계는 공회전 속도에서도 필요한 전기 에너지를 생성해야 한다.
Energy recuperation
엔진(차량)은 변속기를 통해 엔진이 휠에 연결되고 가속 페달과 브레이크 페달이 모두 해제된 상태에서 감속 단계에 있을 때 오버런에 있다. 오버런 중에는 차량의 관성이 엔진을 회전시키고 연료 분사(연료 차단 활성)가 없다. 이 단계에서는 엔진이 차량에 제동장치 역할을 하여 속도가 느려지는 원인이 된다.
오버런 중에 차량의 관성력이 차량을 계속 움직이는 동안 견인력(손실 또는 저항력)이 차량을 멈추려고 시도한다. 이러한 저항력은 도로 하중, 에어로 드래그, 드라이브라인 및 변속기 드래그 및 엔진 드래그. 이러한 힘은 휠 반경에 곱하여 토크로 변환할 수 있다.
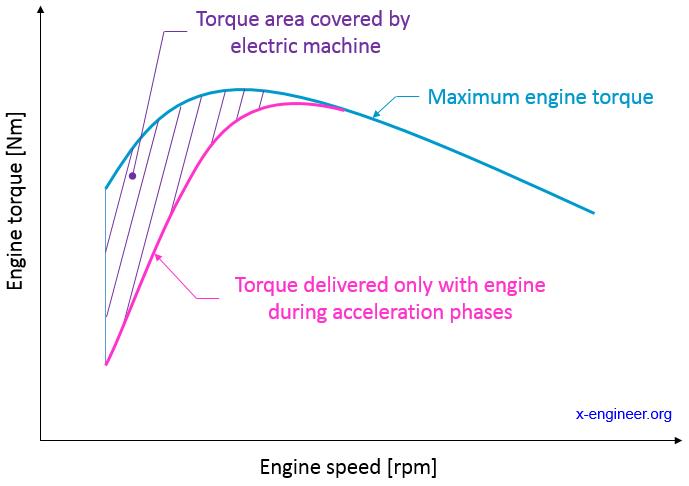
Image: MHEV – energy recuperation with electric machine
차량 및 엔진 손실 외에도, 전기 기계는 발전기 모드에 있으며 충전에 필요한 일정량의 토크 Tem[Nm]이 요구될 것이다.
오버런 시 차량의 총 제동 토크 Tbrk[Nm]는 다음과 같다.
Tbrk=Tevele+Teng+Tem(1)
여기서:
차량 [Nm] – 차량 드래그(저항) 토크이며, 여기에는 도로 하중, 에어로 드래그, 드라이브라인 및 변속기 손실이 포함된다.
Teng[Nm] – 엔진 마찰 및 펌핑 손실과 보조 장치 토크 손실(예: AC 컴프레서, 오일 펌프 등)을 포함하는 엔진 손실
Tem [Nm] – 전기 기계 충전 토크
오버런 중에 전기 기계 토크의 양은 차량의 최대 감속 한계에 의해 제한된다. 전기 기계는 더 많은 전기 에너지를 얻을 수 있다 하더라도(발전기 토크를 증가시킴으로써), 총 제동 토크를 주행성 한계치 이내로 유지하기 위해 일정량만 회수한다.
따라서 에너지 회복은 전기 기계를 발전기 모드(오버런 중)로 설정하고 차량 관성으로부터 전기 에너지를 수집하는 것을 의미한다.
Brake regeneration
운전자가 브레이크 페달을 밟으면 차량이 감속(브레이크)하고 결국 완전히 정지해야 한다. 하이브리드 전기 차량의 경우 운전자가 요청한 브레이크 토크를 전기 기계 토크와 기초(유압) 브레이크 토크로 나눌 수 있다.
제동 이벤트 중에 하이브리드 차량 컨트롤러는 전기 기계에 의해 적용될 수 있는 최대 제동 토크를 브레이크 컨트롤러에 알려준다. 이 제한은 고전압 배터리 충전 상태, 인버터 또는 전기 기계 온도 등과 같은 다양한 요인에 따라 달라진다. 전기 기계에 얼마나 많은 제동 토크를 가할 수 있는지 알고 있는 브레이크 컨트롤러는 운전자의 토크 요구가 충분히 높아서 전기 기계에 의해 충족될 수 없는 경우 또는 차량 속도가 낮은 경우에만 기초 브레이크를 거의 정지할 때까지 작동시킨다.

Image: MHEV – brake regeneration with electric machine
이 경우 운전자가 브레이크를 밟을 때 차량의 총 제동 토크 Tbrk[Nm]는 다음과 같다.
Tbrk=Tvee+Teng+Tem+Tfb(2)
여기서:
Tfb [Nm] – 기초 브레이크 토크(유압 브레이크)
운전자가 약간 브레이크를 밟으면 전기 기계에 의해 전체 브레이크 토크 요구가 충족될 수 있다. 전기기계의 정격전력이 높을수록 적용할 수 있는 최대 제동토크가 높아진다.
브레이크 재생 기능을 하이브리드 컨트롤러와 브레이크 컨트롤러 사이의 연속 브레이크 토크 제어 프로세스로 정의할 수 있으며, 이 프로세스에서 총 브레이크 토크는 다음과 같은 일련의 요소를 고려하여 전기 기계와 기초(유압) 브레이크 사이에 분배된다.
-배터리 충전 상태 및 전력 제한
-인버터 및 전기기계 온도 제한
-프론트 액슬과 리어 액슬 사이의 브레이크 토크 분배
-차량 속도(예: 크리프 속도 중 브레이크 재생 없음)
Electric driving (Creep)
차량 크리프는 차량이 매우 낮은 속도로 천천히 움직이고 있음을 의미한다. 이 모드는 일반적으로 다음과 같은 경우에 얻는다.
- 변속기에 기어가 결속됨(일반적으로 1단 기어)
- 클러치가 닫힘(수동 변속기의 경우)
- 가속 페달을 밟지 않음the engine is at idle speed
기존의 비 하이브리드 차량에서는 기어에서 아이들링(Idling in Gear)이라고도 한다.
자동변속기(AT)가 장착된 차량은 크리프 모드에 쉽게 진입할 수 있다. 주행(D) 모드를 선택하고 차량을 정지한 상태에서 운전자가 브레이크 페달을 놓을 때 휠에서 전달되는 공회전 토크로 인해 차량이 천천히 이동(크립)하기 시작한다.
수동 변속기(MT)가 장착된 차량의 경우, 1단 기어가 맞물리고 클러치 페달을 끝까지 밟은 상태에서 정지 상태에서 기어오르기 위해서는 운전자가 클러치 페달을 천천히 풀고 엔진 공회전 토크를 휠로 전달하기 시작해야 한다. 제어된 방식으로 수행될 경우 공회전 속도를 유지하기 위해 엔진의 공회전 컨트롤러는 천천히 엔진 토크를 증가시켜 차량을 이동시킨다.
차량이 일정한 속도(또는 가속)로 주행 중이고 가속 페달이 해제된 경우에도 크리프 모드에 들어갈 수 있다. 파워트레인 및 노면 손실(드래그)으로 인해 차량이 감속한다. 엔진 속도가 공회전 속도 목표값에 접근하면 엔진의 공회전 컨트롤러가 엔진 토크를 조절하고 차량이 계속 느리게 움직인다.
체결 기어, 차량 중량, 기어비 및 엔진 공회전 속도에 따라 차량의 크리프 속도는 5~10kph이다.
크리프 모드는 엔진의 체적 효율이 최소 수준이기 때문에 매우 비효율적인 작동 지점이다.

Image: Valeo 48V Electric Rear Axle Drive (ERAD)
P3 또는 P4 마일드 하이브리드 차량 아키텍처는 전기 모드에서 차량 크리프를 지원할 수 있다. 전기 기계로 크리프 모드를 수행하면 내연 엔진이 정지될 수 있기 때문에 전체적인 에너지 효율이 향상된다. 이 전기 기계는 저속 주행 시 최대 토크를 전달할 수 있으며, 이 토크는 차량을 시동하고 크리프 속도로 유지하기에 충분하다.
※ 출처 : x-engineer.org
--------------------------------------------------------------------------------------------------------------
중고 자동차 점검 및 매매 지원 서비스(www.korea-autonews.com)
(https://korea-autonews.tistory.com/category/%EA%B3%B5%EC%A7%80%20%EC%82%AC%ED%95%AD)
1. 개인 중고차 매매 시 중고 자동차 점검
- 중대 사고 여부, 침수차 여부, 기타 자동차 점검
- 자동차 엔진 및 트랜스미션 중요 결함 여부 점검
2. 법인 자동차 관리
- 자동차 정기 점검, 자동차 유지 및 정비
- 자동차 Life cycle 관리 및 중고차 판매 조건
- 회사 보유 중고차 대량 구매 및 판매 서비스
3. 자동차 매매 대행 서비스
- 기존 보유 중고차 판매 시 최고가 판매 조건 검색 및 견적 제출
- 중고 자동차 구매 시 최저가 조건 검색 및 구매 중고차 성능 점검
4. 기타
- 자동차 개발 및 정비 분야 30년 경력
(자동차정비기사, 자동차 산업기사, 중고차 진단평가 1급 자격증 보유)
- 본인 출판 책 LIST(자동차 중고 구매 및 자동차 사용법)
1) 지구를 살리는 친환경 자동차 사용법(Yes 24)
2) 자동차 50년 100만 km 타는 법(Yes 24)
3) 자동차 왕초보 중고차 구매법(Yes 24)
- 자동차 서비스 제공 불만족 시 100% 환불
5. 문의 연락처 : 카닥(Car Doc), HP : 010-7102-8900, e-mail : koreaautonews@gmail.com
--------------------------------------------------------------------------------------------------------------
'자동차 학습 > 하이브리드 자동차/PHEV' 카테고리의 다른 글
| 마일드 하이브리드 주요 기계 부품 구성, Mild Hybrid Electric Vehicle (MHEV) – components (Continental) (0) | 2020.11.24 |
|---|---|
| micro, mild, full and plug-in hybrid electric vehicles에 대한 이해 (0) | 2020.10.08 |
| 하이브리드 자동차(Mechanism)의 분류 (0) | 2020.10.06 |
| 마일드 하이브리드 전기차(Mild Hybrid)– architectures (0) | 2020.10.05 |
| 마일드 하이브리드 전기 자동차 (Mild Hybrid Electric Vehicle,MHEV) – 소개 (0) | 2020.10.03 |



